

N10 Söwda Awtonom Intellektual Robot Pol Arassalaýjy Maşyn
Önümiň ýerleşdirilişi
•100% awtonom: ýörite iş ýerinde awtomatiki zarýad beriş doky, süýji suwuň gaýtadan doldurylmagy we suw akdyrmak mümkinçilikleri.
• Netijeli Arassalamak: ýagly we ýapyşykly pollary bolan naharhanalar ýa-da aşhanalar ýaly kyn ýüzleri arassalamakda ajaýyp.
• Ýokary arassalaýyş netijeliligi: sagatda takmynan 5000 inedördül fut, batareýanyň ömri 3-4 sagat dowam edýär
•Ýer tygşytlaýjy dizaýn: Kiçi ölçegli robot dar geçelgelerde we dar giňişliklerde netijeli hereket edip, arassalap bilýär
Müşderi gymmatlyklary
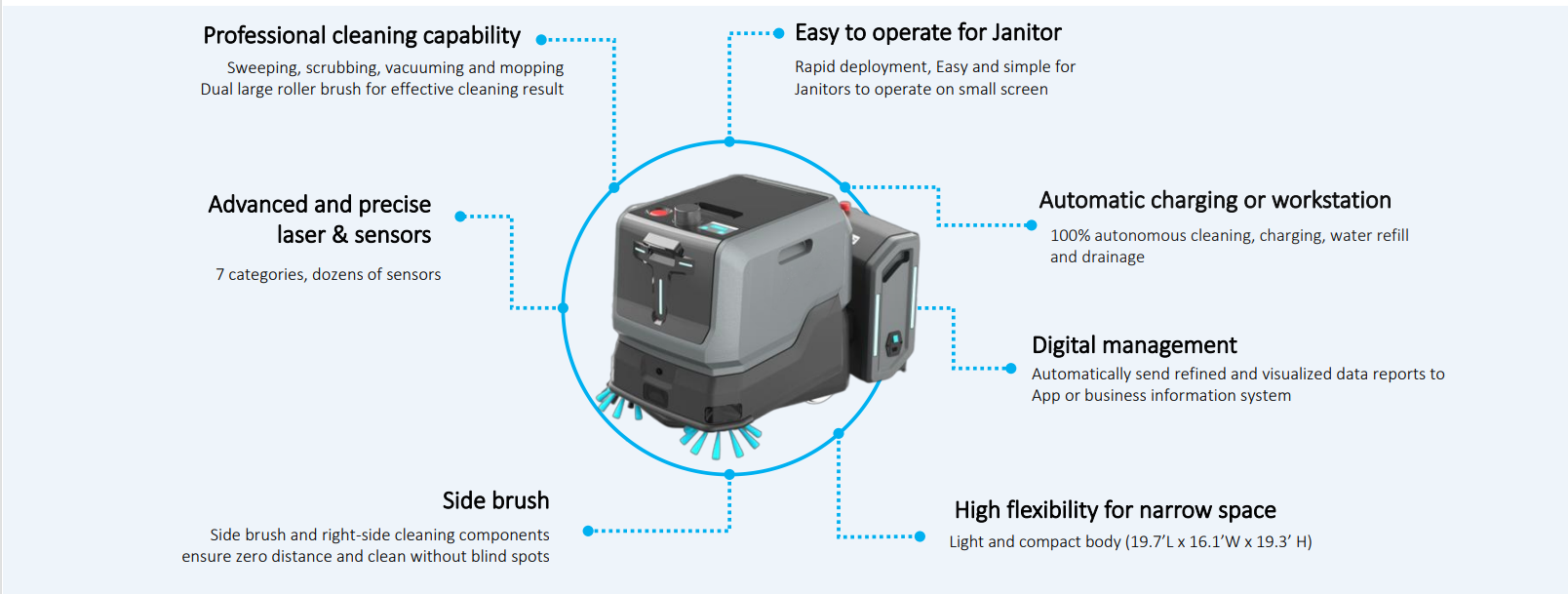
•Ulanyşyň ýönekeýligi we aňsatlygy: çalt ýerleşdirilmegini, çalt başlamagyny we gündelik abatlaýyş işlerini üpjün edýär
• Zähmet netijeliligi: robot pollary arassalamak işleriniň 80% -ini ýeňilleşdirýär we işgärlere diňe galan 20% -ine üns bermäge mümkinçilik berýär
• 4-ü 1-de Arassalaýyş Ulgamy: dürli pollar üçin niýetlenen toplumlaýyn süpürmek, ýuwmak, tozan sormak we süpürmek
• Programma we bulut platformasy arkaly sanly dolandyryş
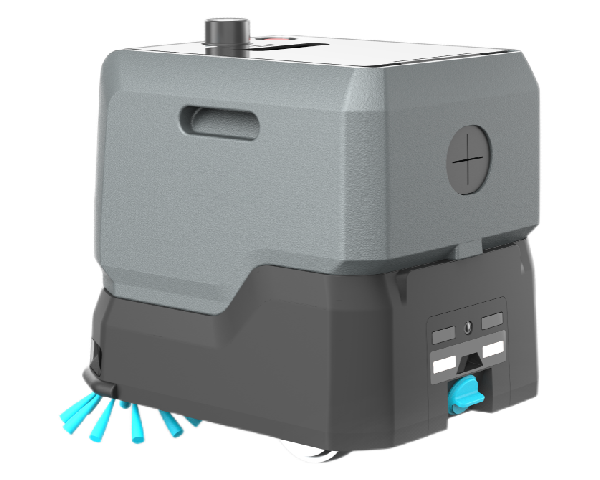
•TN10 maşynynyň ölçegi: 52sm (Uzynlyk) * 42sm (Giňlik) * 49sm (B). Onuň iň inçe göwresi bar we 50 mm-den aşak boşlugy geçirip bilýär.
•Agramy: 26KGS. Häzirki wagta çenli bazardaky iň ýeňil enjam.
•TN10 gurak we çygly bölgüleri ulanýan ýeke-täk robotdyr
Önümiň bölünişi
| N10-yň tehniki häsiýetnamalary | ||||
|
Esasy Parametrler
| Ölçegler U*W*B | 520 * 420 * 490 mm | El bilen işlemek | Goldaw |
| Agram | 26 kg (suwdan başga) | Arassalaýyş usullary | Süpürmek | Sowurmak | Sürtmek | |
|
Öndürijilik
| Sürtmek üçin giňlik | 350 mm | Arassalaýyş tizligi | 0.6m/s |
| Sowurujynyň giňligi | 400 mm | Iş netijeliligi | 756 ㎡/sagat | |
| Süpürmek giňligi | 430 mm | Dyrmaşmak ukyby | 10% | |
| Rolikli çotkanyň toprak basyşy | 39.6g/sm² | Robotyň gyrasyna çenli aralyk | 0 sm | |
| Pol ýuwmak çotganyň aýlanmagy tizlik | 0~700 aýlanma/minut | Şowhun | <65dB | |
| Arassa suw çelekleriniň göwrümi | 10L | Zibil gutusynyň göwrümi | 1L | |
| Hapa suw çelek kuwwatlylyk | 15L | |||
| Elektron
| Batareýanyň woltasy | 25.6V | Doly zarýadyň çydamlylyk wagty | Pollary süpürmek 3,5 sagat; 8 sagat süpürmek |
| Batareýanyň kuwwaty | 20Ah | Zarýad beriş usuly | Awtomatiki zarýadlama wagty zarýad beriji üýşmek | |
| Akylly
| Nawigasiýa çözgüt | Görüş + Lazer | Sensor çözgütleri | Panoramik Monokulýar Kamera / Lazer Radar / 3D TOF Kamera / Bir Setirli Lazer / IMU / Elektron Çaknyşma garşy zolak / Material Sensory / Gyra Sensor / Suwuklyk derejesi sensory / Dinamik / Mikrofon |
| Kamera | Standart Konfigurasiýa | Liftiň dolandyryşy | Goşmaça Konfigurasiýa | |
| OTA | Standart Konfigurasiýa | Tutgyç | Goşmaça Konfigurasiýa | |
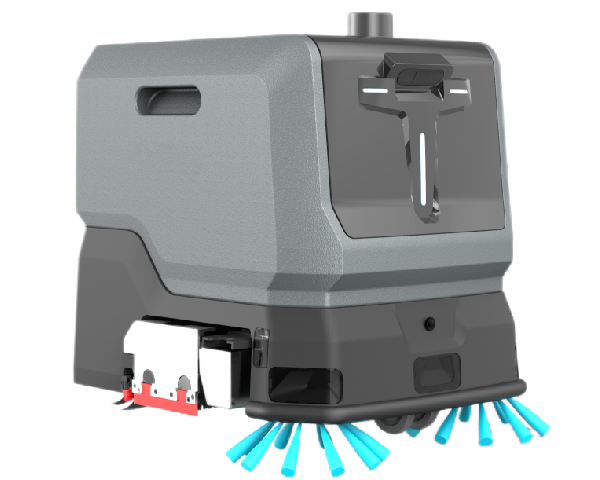
Önümiň esasy funksiýasy

• Çuňluk kamerasy: ýokary kadr tizligi, inçe surata düşürmek üçin örän duýgur, giň görüş burçy
• LiDAR: ýokary tizlikli, uzak aralyk ölçeýiş, takyk aralyk ölçeýiş
• Bedeniň töwereginde 5 sany çyzykly lazer: päsgelçilikleri pes derejede tanamak, çyzyk, çaknyşmadan gaça durmak, üýşüp deňleşdirmek, päsgelçiliklerden gaça durmak, köp sensorly hyzmatdaşlyk, bedeniň töwereginde ölü burç ýoklugy üçin ulanylýar
• Elektron çaknyşma garşy zolak: Tötänleýin çaknyşma ýagdaýynda, howpsuzlygy üpjün etmek üçin gyssagly ýagdaýlarda saklanýan enjam derhal işlejek
• Gapdal çotga: gyrasyna “0” ýetiň, görünmeýän ýerlersiz arassalaň
Önümiň wideosy
Önümleriň kategoriýalary
-

E531B&E531BD Pol ýuwujy maşynyň arkasynda ýöremek...
-

Senagat öz-özüni zarýadlaýan awtonom awtomatiki...
-

E1060R Uly Ölçegli Awtomatiki Ýer Sürtgüsi ...
-

E860R Pro Max 34 dýuýmlyk orta ölçegli pol üstünde gezelenç...
-

EC530B/EC530BD Pol ýuwujy guradyjynyň arkasynda ýöremek
-

EC380 Kiçi we Elýeterli Mikro Skrab Maşyn